全國服務熱線:
180-9257-8363
180-9257-8363

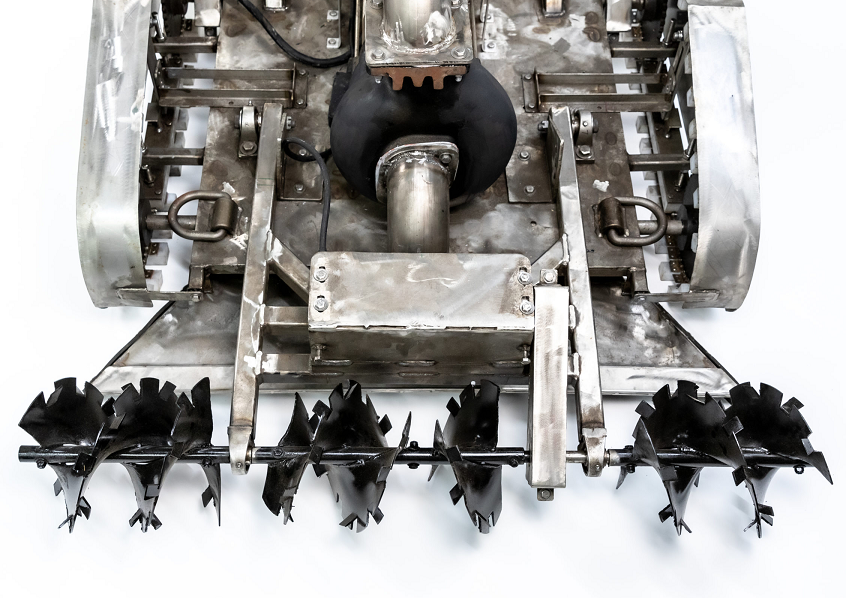
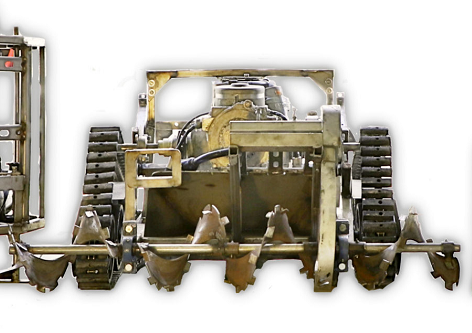
水下作業機器人是一種工作于水下的極限作業機器人,水下環境惡劣危險,人的潛水深度有限,所以水下作業機器人已成為開發海洋的重要工具。那么水下作業機器人的特點都有哪些呢?
1、水下機器人的優點
水下機器人可在高度危險環境、被污染環境以及零可見度的水域代替人工在水下長時間作業,水下機器人上一般配備聲吶系統、攝像機、照明燈和機械臂等裝置,能提供實時視頻、聲吶圖像,機械臂能抓起重物,水下機器人在石油開發、海事執法取證、科學研究和軍事等領域得到廣泛應用。

2、水下機器人的缺點
由于水下機器人運行的環境復雜,水聲信號的噪聲大,而各種水聲傳感器普遍存在精度較差、跳變頻繁的缺點,因此水下機器人運動控制系統中,濾波技術顯得極為重要。水下機器人運動控制中普遍采用的位置傳感器為短基線或長基線水聲定位系統,速度傳感器為多普勒速度計會影響水聲定位系統精度。因素主要包括聲速誤差、應答器響應時間的丈量誤差、應答器位置即間距的校正誤差。而影響多普勒速度計精度的因素主要包括聲速、海水中的介質物理化學特性、運載器的顛簸等。
以上就是為大家分享的水下作業機器人的特點,希望對大家有所幫助。